


实验简介
机器人技术是科学技术的制高点,是一个国家创新能力的标志。团队依托教育部重点实验室和国家级虚拟仿真实验教学中心,将学科前沿成果反哺教学,采用虚拟仿真技术设计了“系统集成-运动控制-智能感知-双臂协作”四个逐层递进的实验教学模块,底层数据源于科研和工程实际,高度逼真地再现电力系统复杂环境下智能机器人控制的核心要素,动态呈现机器人作业过程,并提供了丰富的交互功能,可试验和验证学生自主设计的系统控制方案。
设计原则
实验包含四个主要环节,以工程实际高空电力作业为背景,紧扣《机器人控制技术》、《机器人控制技术创新创业实践》、《运动控制原理》课程大纲中的知识点展开。实验内容由浅入深,兼顾知识性与趣味性,实验开始后学生会来到高铁配电线路工作站点,通过互动引导实地观察机器人的作业环境,了解更换避雷器的作业任务,通过对项目所选用的双臂协同智能机器人进行系统装配、视觉处理、运动学建模、轨迹规划、双臂协同操作控制一系列的任务,最终实现对复杂环境下智能机器人高危作业的自动控制,通过设计完整的操作步骤,让智能机器人自主完成更换避雷器的任务。
该虚拟仿真教学实验主要包括认知、实践、探究三大模块,结合高铁站配电线路故障的实际场景,通过任务驱动的方式帮助学生具备将所学的理论知识应用于工程解决实际问题的能力。
1、智能机器人模块化设计及功能调试的认知教学—机器人“系统搭建”
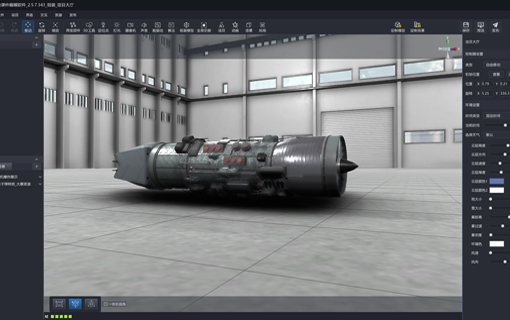
智能机器人代替人工完成复杂环境下的高危电力作业,需要学生对电力作业环境有足够的认知,充分了解机器人代替人工作业的关键操作。同时,双臂协同机器人系统组成包括动力模块、通信模块、视觉模块、控制模块和末端执行模块,本实验重点关注控制算法的实现和参数优化,但是系统的整体组装和功能调试是必不可少的操作。
关键仿真要素:电力作业场景、智能机器人各组成模块。
2、智能机器人手眼结合工作原理应用教学—机器人“眼睛看到”
根据重构的作业环境及识别出的抓取目标的位置,要求学生能够使用基于伽马参数调节的图像处理算法使机器人对于工作场景能够准确识别,并快速标定作业目标,通过对“眼在手上”的机器人进行位置标定和距离测定,为后续运动路径规划提供基础。
关键仿真要素:全景相机拍摄作业画面、“眼在手上”的机械臂结构、机器人视觉处理全过程分析及伽马参数调节。
3、双机械臂运动学建模及运动路径规划互动教学—机器人“手臂抓到”
对机械人进行运动控制的前提是对6自由度机械臂进行运动学建模,学生需要掌握基于DH参数的多自由度空间建模,机械臂正逆运动学求解以及基于笛卡尔空间和关节空间的运动路径规划。
关键仿真要素:6自由度机械臂运动学建模、随参数整定的运动路径。
4、复杂环境下电力作业任务分解与功能实现情景式教学—机器人“自主作业”
实验下发了10Kv配电线路避雷器更换的工作任务,通过对拆卸避雷器的工作任务分解使学生理解理论知识在实际场景中的具体应用,引导学生结合视觉处理、路径规划、末端控制等内容完成复杂环境下的高危作业。
关键仿真要素:末端执行工装、高空带电线路、避雷器及相关连接装置。
实验目的
本团队依托南京理工大学国家级“双一流”学科建设点,“电气工程及自动化”国家级虚拟仿真实验教学示范中心、“高维信息智能感知与系统”教育部重点实验室和 “多运动体信息感知与协同控制”江苏省高校重点实验室和江苏省自动化实验教学实验示范中心,面向社会对能够从事高危作业机器人研发的创新人才培养的需要和南京理工大学“自动化”国家级一流专业建设任务,坚持以学生为中心的实验教学理念,遵照虚拟仿真实验项目 “能实不虚,虚实结合”的原则,将科研成果反哺实验教学,自主研发了高空高压环境下的配电线路维护机器人控制算法并嵌入到虚拟仿真实验平台,平台面向高校和企业免费开放。
本实验项目依据《机器人控制技术》、《机器人控制技术创新创业实践》课程大纲和关键知识点,针对当前国家急需培养能够从事高危作业机器人研发的创新型人才的需求,结合10kV配电线路维护机器人研发的工程实际,通过计算机三维仿真技术,设计复杂环境下智能机器人高危作业虚拟仿真实验,再现配电线路维护中经典的更换避雷器的真实作业场景,还原整个操作的全过程,旨在培养学生的系统性思维方式和解决复杂问题的综合能力,具体实验目的包括:(1)通过复杂环境下高危作业的认知与智能机器人模块化组装调试与环节,帮助学生理解智能机器人的系统组成、自动控制原理和信息采集与传输技术,通过自主操作感受智能机器人自主感知环境、调整控制路径、完成控制作业的全过程,使学生具备智能机器人结构组装、系统设计、简单功能调试的能力。(2)使学生掌握图像处理技术和基于双目测定的位置标定算法,促进学生对6自由度机械臂运动学建模和运动路径规划的学习和理解。介绍基于DH参数法的机械臂建模和笛卡尔空间路径规划,通过实时展示参数整定对机器人运动路径的影响加深学生对机械臂运动控制规律的理解,通过虚拟场景与实际调试相结合的方式使学生具备多关节机器人运动学建模、运动轨迹规划、控制算法优化的能力。(3)通过真实还原高空电力作业场景,下发避雷器更换的电力作业任务,通过实验引导与学生自主设计详相结合的方式,帮助学生综合理解和应用所学轨迹规划、信息处理、控制算法相关的知识,控制智能机器人代替人工完成高危电力作业,使学生具备解决工程实际问题的能力。
实验要求
(1)专业与年级要求
自动化、机器人工程、智能制造等相关专业的本科生、研究生。
(2)基本知识和能力要求
矩阵分析、高级编程语言等





