

实验简介
随着海洋探测的日益增长,比如飞机坠海事件,需要对大面积、较深海域进行大规模的搜索探测,一次探测会耗费大量的人力物力财力,再加之各种天气及地理的客观因素,使得实际的探测工作很难完成。急需水下滑翔器搭载自主导航与控制系统下潜海中完成指定任务。 另外,随着深海技术、精密仪器、电气自动化等学科的发展,使得水下滑翔器深海探测逐渐成为现实。
设计原则
近年来国家提出“在深海进入、深海探测、深海开发方面占领高地,特别是在这三个层面的关键技术上面,要实现自主可控”的发展方向。海洋试点国家实验室主任委员会主任吴立新院士在2018年12月13日海洋创新报告中提出:“全球两千米以下的海洋探索目前基本是空白,即便是两千米以上的海洋还有很多东西未知,深入研究这一技术意义重大,需要解决探测尤其是深海导航与定位问题,实现国家提出的认识海洋、经略海洋的‘深海星空计划’。”
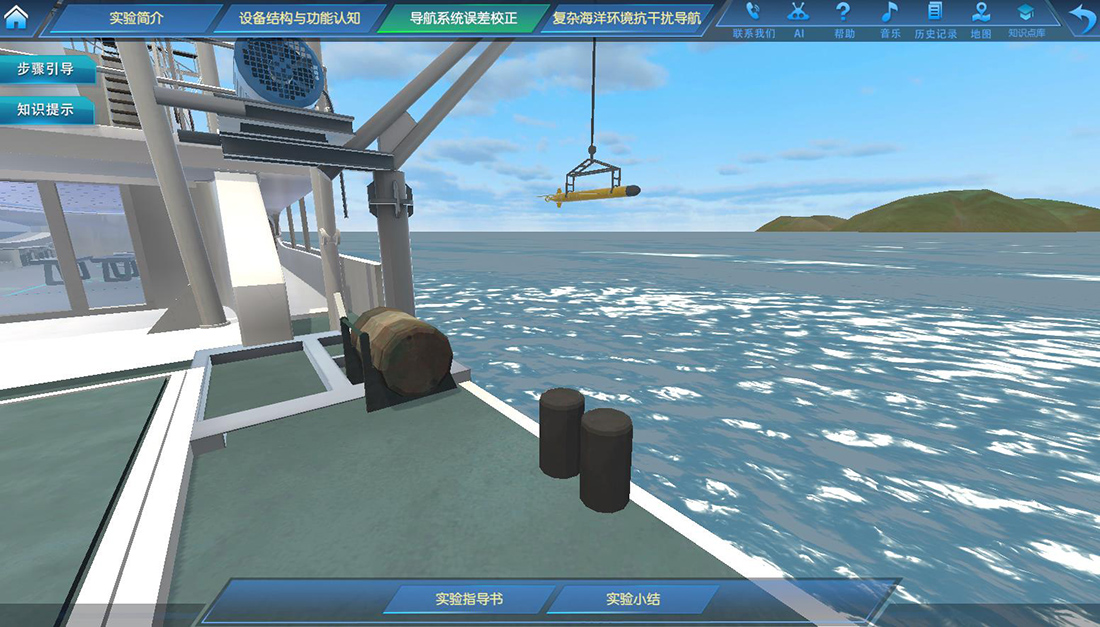
水下滑翔器作为一种新型且重要的水下潜器,是海洋勘测、水下探测及搜救的重要手段。为了找寻海洋中失事的飞机,滑翔器需要搭载导航系统进行大范围长时间的海洋探测,对其进行虚拟场景再现和过程仿真实验具有非常重要的意义。
实验目的
复杂海洋中水下滑翔器的高精度导航是水下勘测领域教学与科研的难点之一。海洋环境具有较多不可控因素,并且环境复杂多变,涉及电气电子类专业多方面理论与方法的综合运用,采用现场实验和方案设计难度大、风险高、周期长。水下滑翔器作为一种新型且重要的水下潜器,是海洋勘测、水下探测及搜救的重要手段。为了找寻海洋中失事的飞机,滑翔器需要搭载导航系统进行大范围长时间的海洋探测,对其进行虚拟场景再现和过程仿真实验具有非常重要的意义。因此,对其进行虚拟场景再现和过程仿真实验具有非常重要的意义。
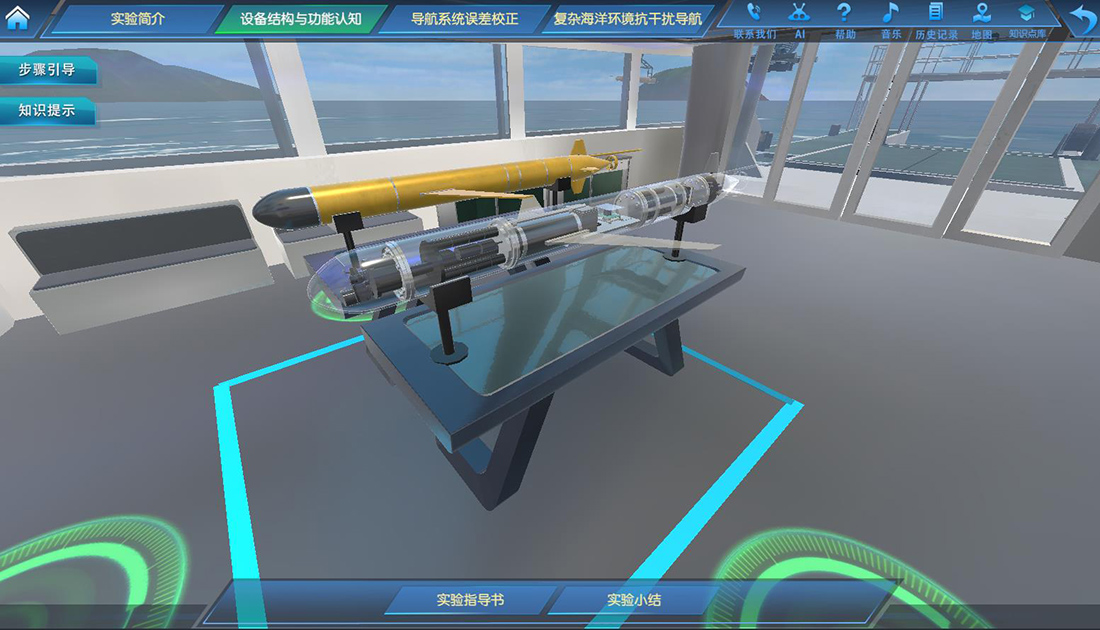
本实验项目依托多项教学项目、国家自然科学基金、江苏省自然科学基金进行开发,面向电气电子专业核心课程的关键知识点,基于工程实际案例开发水下运行场景。通过各实验步骤的设计:
(1)帮助学生了解复杂环境中导航系统自主导航的基本特征与要求;
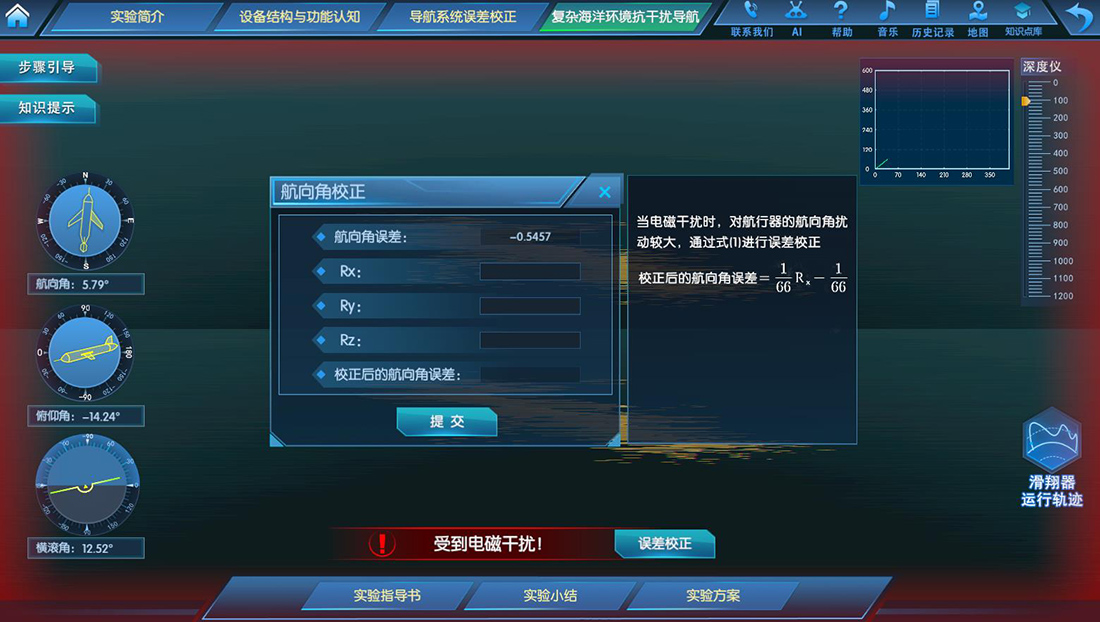
(2)可视化模拟水下多传感器抗干扰算法的基本原理;
(3)掌握不同水下环境中,环境模型建立及导航关键参数的设置方法,虚拟再现不同环境因素下导航参数调节实施效果,提升学生综合实践能力;
(4)掌握多因素干扰环境中,导航传感器切换方式及噪声参数调节方法,虚拟再现不同干扰参数对应的导航参数调节方案实施效果,提高学生对多因素影响下高精度导航方案设计创新实践能力;
实验要求
1. 网络条件要求
(1)说明客户端到服务器的带宽要求(需提供测试带宽服务)
20M 下行对等带宽。经测试客户机带宽在 20M以上时能够有较快的加载速度和较好的交互体验。 本次测试基于主流配置计算机,模拟学生在校内校外不同的使用环境,最大限度的还原用户上网学习虚拟仿真实验的需求。
(2)说明能够提供的并发响应数量(需提供在线排队提示服务)并发响应数 300, 可提供在线排队提示服务。
2. 用户操作系统要求(如Windows、Unix、IOS、Android等)
(1)计算机操作系统和版本要求
Windows7、Windows8、Windows10
(2)其它计算终端操作系统和版本要求
无
(3)服务器操作系统
Linux(centos/ubuntu)/Unix/windows2008(2012/2016)
3. 用户硬件配置要求(如主频、内存、显存、存储容量等)
(1)计算机硬件配置要求
Web 端用户硬件要求
处理器: Intel(R) Core(TM) i5
主频: 2.4GHz
内存: 8GB
显卡: NVIDIA GeForce GTX GT740 2G
(2)其它计算终端硬件配置要求
无特殊要求,满足上网功能即可。
4. 学生要求
电气电子类大二以上学生